Implementation of the Kalman filter method. More...
#include <KalmanFilter.h>
Public Types | |
| enum | KalmanType { KT_STANDARD , KT_FADINGMEMORY } |
| Enumerate different Kalman filter types. More... | |
Public Member Functions | |
| KalmanFilter (std::size_t const sizeState, KalmanType const type) | |
| Kalman filter class constructor. | |
| virtual | ~KalmanFilter () |
| Destructor. | |
| void | setSizeObservation (std::size_t const sizeObservation) |
| Set observation vector size. | |
| void | setState (double *state) |
| Set pointer to current state. | |
| void | setError (double const *const error) |
| Set pointer to current error vector. | |
| void | setError (double const *const error, std::size_t const size) |
| Set pointer to current error vector. | |
| void | setJacobian (double const *const jacobian) |
| Set pointer to current Jacobi matrix. | |
| void | setJacobian (double const *const jacobian, std::size_t const columns) |
| Set pointer to current Jacobi matrix. | |
| void | update () |
| Update error covariance matrix and state vector. | |
| void | update (std::size_t const sizeObservation) |
| Update error covariance matrix and state vector. | |
| void | setParametersStandard (double const epsilon, double const q0, double const qtau, double const qmin, double const eta0, double const etatau, double const etamax) |
| Set parameters for standard Kalman filter. | |
| void | setParametersFadingMemory (double const epsilon, double const q0, double const qtau, double const qmin, double const lambda, double const nu) |
| Set parameters for fading memory Kalman filter. | |
| std::string | status (std::size_t epoch) const |
| Status report. | |
| std::vector< std::string > | statusHeader () const |
| Header for status report file. | |
| std::vector< std::string > | info () const |
| Information about Kalman filter settings. | |
| KalmanType | getType () const |
| Getter for type. | |
| std::size_t | getSizeObservation () const |
| Getter for sizeObservation. | |
| std::size_t | getNumUpdates () const |
| Getter for numUpdates. | |
| double | getEta () const |
| Getter for eta. | |
| double | getEpsilon () const |
| Getter for epsilon. | |
| double | getQ0 () const |
| Getter for q0. | |
| double | getQtau () const |
| Getter for qtau. | |
| double | getQmin () const |
| Getter for qmin. | |
| double | getLambda () const |
| Getter for lambda. | |
| double | getNu () const |
| Getter for nu. | |
| double | getGamma () const |
| Getter for gamma. | |
 Public Member Functions inherited from nnp::Updater Public Member Functions inherited from nnp::Updater | |
| virtual void | setupTiming (std::string const &prefix="upd") |
| Activate detailed timing. | |
| virtual void | resetTimingLoop () |
| Start a new timing loop (e.g. | |
| virtual std::map< std::string, Stopwatch > | getTiming () const |
| Return timings gathered in stopwatch map. | |
Private Attributes | |
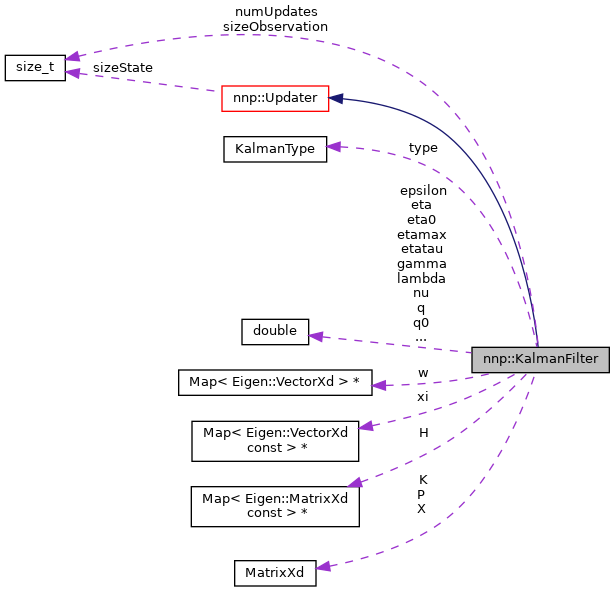
| KalmanType | type |
| Kalman filter type. | |
| std::size_t | sizeObservation |
| Size of observation (measurement) vector. | |
| std::size_t | numUpdates |
| Total number of updates performed. | |
| double | epsilon |
| Error covariance initialization parameter \(\epsilon\). | |
| double | q |
| Process noise \(q\). | |
| double | q0 |
| Process noise initial value \(q_0\). | |
| double | qtau |
| Process noise exponential decay parameter \(q_{\tau}\). | |
| double | qmin |
| Process noise minimum value \(q_{\text{min}}\). | |
| double | eta |
| Learning rate \(\eta\). | |
| double | eta0 |
| Learning rate initial value \(\eta_0\). | |
| double | etatau |
| Learning rate exponential increase parameter \(\eta_{\tau}\). | |
| double | etamax |
| Learning rate maximum value \(\eta_{\text{max}}\). | |
| double | lambda |
| Forgetting factor for fading memory Kalman filter. | |
| double | nu |
| Parameter for fading memory Kalman filter. | |
| double | gamma |
| Forgetting gain factor gamma for fading memory Kalman filter. | |
| Eigen::Map< Eigen::VectorXd > * | w |
| State vector. | |
| Eigen::Map< Eigen::VectorXd const > * | xi |
| Error vector. | |
| Eigen::Map< Eigen::MatrixXd const > * | H |
| Derivative matrix. | |
| Eigen::MatrixXd | P |
| Error covariance matrix. | |
| Eigen::MatrixXd | K |
| Kalman gain matrix. | |
| Eigen::MatrixXd | X |
| Intermediate result X = P . H. | |
Additional Inherited Members | |
| Protected Member Functions inherited from nnp::Updater | |
| Updater (std::size_t const sizeState) | |
| Constructor. | |
| Protected Attributes inherited from nnp::Updater | |
| bool | timing |
| Whether detailed timing is enabled. | |
| bool | timingReset |
| Internal loop timer reset switch. | |
| std::size_t | sizeState |
| Number of neural network connections (weights + biases). | |
| std::string | prefix |
| Prefix for timing stopwatches. | |
| std::map< std::string, Stopwatch > | sw |
| Stopwatch map for timing. | |
Detailed Description
Implementation of the Kalman filter method.
Definition at line 31 of file KalmanFilter.h.
Member Enumeration Documentation
◆ KalmanType
Enumerate different Kalman filter types.
| Enumerator | |
|---|---|
| KT_STANDARD | Regular Kalman filter. |
| KT_FADINGMEMORY | Kalman filtering with fading memory modification. |
Definition at line 35 of file KalmanFilter.h.
Constructor & Destructor Documentation
◆ KalmanFilter()
| KalmanFilter::KalmanFilter | ( | std::size_t const | sizeState, |
| KalmanType const | type ) |
Kalman filter class constructor.
- Parameters
-
[in] sizeState Size of the state vector w. [in] type Kalman filter type (see KalmanType).
Definition at line 27 of file KalmanFilter.cpp.
References epsilon, eta, eta0, etamax, etatau, gamma, H, K, KT_FADINGMEMORY, KT_STANDARD, lambda, nu, numUpdates, P, q, q0, qmin, qtau, sizeObservation, nnp::Updater::sizeState, type, nnp::Updater::Updater(), w, and xi.

◆ ~KalmanFilter()
|
virtual |
Member Function Documentation
◆ setSizeObservation()
| void KalmanFilter::setSizeObservation | ( | std::size_t const | sizeObservation | ) |
Set observation vector size.
- Parameters
-
[in] size Size of the observation vector.
If the size of the observation vector is known in advance it can be set here.
Definition at line 76 of file KalmanFilter.cpp.
References sizeObservation.
Referenced by nnp::Training::update().

◆ setState()
|
virtual |
Set pointer to current state.
- Parameters
-
[in,out] state Pointer to state vector (weights vector), will be changed in-place upon calling update().
Implements nnp::Updater.
Definition at line 83 of file KalmanFilter.cpp.
References nnp::Updater::sizeState, and w.
◆ setError() [1/2]
| void KalmanFilter::setError | ( | double const *const | error | ) |
Set pointer to current error vector.
- Parameters
-
[in] error Pointer to error (difference between reference and neural network potential output).
Definition at line 90 of file KalmanFilter.cpp.
References setError(), and sizeObservation.
Referenced by setError().


◆ setError() [2/2]
|
virtual |
Set pointer to current error vector.
- Parameters
-
[in] error Pointer to error (difference between reference and neural network potential output). [in] size Number of error vector entries.
Implements nnp::Updater.
◆ setJacobian() [1/2]
| void KalmanFilter::setJacobian | ( | double const *const | jacobian | ) |
Set pointer to current Jacobi matrix.
- Parameters
-
[in] jacobian Derivatives of error with respect to weights.
Definition at line 104 of file KalmanFilter.cpp.
References setJacobian(), and sizeObservation.
Referenced by setJacobian().


◆ setJacobian() [2/2]
|
virtual |
Set pointer to current Jacobi matrix.
- Parameters
-
[in] jacobian Derivatives of error with respect to weights. [in] columns Number of gradients provided.
- Note
- If there are \(m\) errors and \(n\) weights, the Jacobi matrix is a \(n \times m\) matrix stored in column-major order.
Implements nnp::Updater.
◆ update() [1/2]
|
virtual |
Update error covariance matrix and state vector.
Implements nnp::Updater.
Definition at line 119 of file KalmanFilter.cpp.
References sizeObservation, and update().
Referenced by update().


◆ update() [2/2]
| void nnp::KalmanFilter::update | ( | std::size_t const | sizeObservation | ) |
◆ setParametersStandard()
| void KalmanFilter::setParametersStandard | ( | double const | epsilon, |
| double const | q0, | ||
| double const | qtau, | ||
| double const | qmin, | ||
| double const | eta0, | ||
| double const | etatau, | ||
| double const | etamax ) |
Set parameters for standard Kalman filter.
- Parameters
-
[in] epsilon Error covariance initialization parameter \(\epsilon\). [in] q0 Process noise initial value \(q_0\). [in] qtau Process noise exponential decay parameter \(q_{\tau}\). [in] qmin Process noise minimum value \(q_{\text{min}}\). [in] eta0 Initial learning rate \(\eta_0\). [in] etatau Learning rate exponential increase parameter \(\eta_{\tau}\). [in] etamax Learning rate maximum value \(\eta_{\text{max}}\).
Definition at line 199 of file KalmanFilter.cpp.
References epsilon, eta, eta0, etamax, etatau, P, q, q0, qmin, and qtau.
Referenced by nnp::Training::setupTraining().

◆ setParametersFadingMemory()
| void KalmanFilter::setParametersFadingMemory | ( | double const | epsilon, |
| double const | q0, | ||
| double const | qtau, | ||
| double const | qmin, | ||
| double const | lambda, | ||
| double const | nu ) |
Set parameters for fading memory Kalman filter.
- Parameters
-
[in] epsilon Error covariance initialization parameter \(\epsilon\). [in] q0 Process noise initial value \(q_0\). [in] qtau Process noise exponential decay parameter \(q_{\tau}\). [in] qmin Process noise minimum value \(q_{\text{min}}\). [in] lambda Forgetting factor \(\lambda\). [in] nu Fading memory parameter \(\nu\).
Definition at line 222 of file KalmanFilter.cpp.
References epsilon, gamma, lambda, nu, P, q, q0, qmin, and qtau.
Referenced by nnp::Training::setupTraining().

◆ status()
|
virtual |
Status report.
- Parameters
-
[in] epoch Current epoch.
- Returns
- Line with current status information.
Implements nnp::Updater.
Definition at line 243 of file KalmanFilter.cpp.
References eta, gamma, K, KT_FADINGMEMORY, KT_STANDARD, lambda, numUpdates, P, q, nnp::Updater::sizeState, nnp::strpr(), and type.

◆ statusHeader()
|
virtual |
Header for status report file.
- Returns
- Vector with header lines.
Implements nnp::Updater.
Definition at line 268 of file KalmanFilter.cpp.
References nnp::createFileHeader(), KT_FADINGMEMORY, KT_STANDARD, and type.

◆ info()
|
virtual |
Information about Kalman filter settings.
- Returns
- Vector with info lines.
Implements nnp::Updater.
Definition at line 321 of file KalmanFilter.cpp.
References epsilon, eta0, etamax, etatau, KT_FADINGMEMORY, KT_STANDARD, lambda, nu, q0, qmin, qtau, sizeObservation, nnp::Updater::sizeState, nnp::strpr(), and type.

◆ getType()
|
inline |
◆ getSizeObservation()
|
inline |
Getter for sizeObservation.
Definition at line 248 of file KalmanFilter.h.
References sizeObservation.
◆ getNumUpdates()
|
inline |
◆ getEta()
|
inline |
◆ getEpsilon()
|
inline |
◆ getQ0()
|
inline |
◆ getQtau()
|
inline |
◆ getQmin()
|
inline |
◆ getLambda()
|
inline |
◆ getNu()
|
inline |
◆ getGamma()
| double nnp::KalmanFilter::getGamma | ( | ) | const |
Getter for gamma.
Member Data Documentation
◆ type
|
private |
Kalman filter type.
Definition at line 196 of file KalmanFilter.h.
Referenced by getType(), info(), KalmanFilter(), status(), and statusHeader().
◆ sizeObservation
|
private |
Size of observation (measurement) vector.
Definition at line 198 of file KalmanFilter.h.
Referenced by getSizeObservation(), info(), KalmanFilter(), setError(), setJacobian(), setSizeObservation(), update(), and update().
◆ numUpdates
|
private |
Total number of updates performed.
Definition at line 200 of file KalmanFilter.h.
Referenced by getNumUpdates(), KalmanFilter(), and status().
◆ epsilon
|
private |
Error covariance initialization parameter \(\epsilon\).
Definition at line 202 of file KalmanFilter.h.
Referenced by getEpsilon(), info(), KalmanFilter(), setParametersFadingMemory(), setParametersStandard(), and update().
◆ q
|
private |
Process noise \(q\).
Definition at line 204 of file KalmanFilter.h.
Referenced by KalmanFilter(), setParametersFadingMemory(), setParametersStandard(), and status().
◆ q0
|
private |
Process noise initial value \(q_0\).
Definition at line 206 of file KalmanFilter.h.
Referenced by getQ0(), info(), KalmanFilter(), setParametersFadingMemory(), setParametersStandard(), and update().
◆ qtau
|
private |
Process noise exponential decay parameter \(q_{\tau}\).
Definition at line 208 of file KalmanFilter.h.
Referenced by getQtau(), info(), KalmanFilter(), setParametersFadingMemory(), setParametersStandard(), and update().
◆ qmin
|
private |
Process noise minimum value \(q_{\text{min}}\).
Definition at line 210 of file KalmanFilter.h.
Referenced by getQmin(), info(), KalmanFilter(), setParametersFadingMemory(), setParametersStandard(), and update().
◆ eta
|
private |
Learning rate \(\eta\).
Definition at line 212 of file KalmanFilter.h.
Referenced by getEta(), KalmanFilter(), setParametersStandard(), and status().
◆ eta0
|
private |
Learning rate initial value \(\eta_0\).
Definition at line 214 of file KalmanFilter.h.
Referenced by info(), KalmanFilter(), setParametersStandard(), and update().
◆ etatau
|
private |
Learning rate exponential increase parameter \(\eta_{\tau}\).
Definition at line 216 of file KalmanFilter.h.
Referenced by info(), KalmanFilter(), setParametersStandard(), and update().
◆ etamax
|
private |
Learning rate maximum value \(\eta_{\text{max}}\).
Definition at line 218 of file KalmanFilter.h.
Referenced by info(), KalmanFilter(), setParametersStandard(), and update().
◆ lambda
|
private |
Forgetting factor for fading memory Kalman filter.
Definition at line 220 of file KalmanFilter.h.
Referenced by getLambda(), info(), KalmanFilter(), setParametersFadingMemory(), status(), and update().
◆ nu
|
private |
Parameter for fading memory Kalman filter.
Definition at line 222 of file KalmanFilter.h.
Referenced by getNu(), info(), KalmanFilter(), setParametersFadingMemory(), and update().
◆ gamma
|
private |
Forgetting gain factor gamma for fading memory Kalman filter.
Definition at line 224 of file KalmanFilter.h.
Referenced by KalmanFilter(), setParametersFadingMemory(), and status().
◆ w
|
private |
State vector.
Definition at line 226 of file KalmanFilter.h.
Referenced by KalmanFilter(), and setState().
◆ xi
|
private |
◆ H
|
private |
◆ P
|
private |
Error covariance matrix.
Definition at line 232 of file KalmanFilter.h.
Referenced by KalmanFilter(), setParametersFadingMemory(), setParametersStandard(), and status().
◆ K
|
private |
Kalman gain matrix.
Definition at line 234 of file KalmanFilter.h.
Referenced by KalmanFilter(), and status().
◆ X
|
private |
Intermediate result X = P . H.
Definition at line 236 of file KalmanFilter.h.
The documentation for this class was generated from the following files:
- /home/runner/work/n2p2/n2p2/src/libnnptrain/KalmanFilter.h
- /home/runner/work/n2p2/n2p2/src/libnnptrain/KalmanFilter.cpp